
ランキングに参加しています!クリックで応援をお願いします!

京都市で自動運転バスの実証実験が開始
京都市では、NTTドコモビジネス株式会社がコンソーシアムを組み、京都市とともに自動運転バスの走行に関する実証実験を実施すると発表しました。この実証実験は、令和8年3月24日(火)から29日(日)までの期間、京都市内のルートで運行される予定です。公営交通として政令指定都市で初めての取り組みであり、将来的な自動運転バスの実装を目指しています。

背景と目的
京都市では、バス運転士の不足への対応や交通事故の低減といった交通課題の解決に加え、市民の利便性向上や地域活性化に繋がる自動運転バスの導入が検討されています。今回の実証実験は、これらの課題解決と目標達成に向けた重要な一歩となります。
自動運転に適した道路環境などを総合的に検討した結果、自動運転レベル4※1の実装化の可能性が高い地域として、洛西ニュータウンエリアが選定されました。
実証実験の概要
洛西ニュータウンエリアにおいて、令和9年度中の自動運転レベル4認可取得を見据え、小型EVバスを活用したレベル2※2の自動運転バス実証実験が行われます。
実証場所
-
洛西ニュータウン周回:1周約6.9km/自動運転レベル2
-
洛西バスターミナル―JR桂川駅前:片道約3.8km/手動運転(次年度自動運転予定)
-
全長:約14.5km
自動運転車両
-
使用車両:小型EVバス車両
-
定員:15名(着座のみ)
-
センサー/カメラ:LiDAR※3 8台、車載カメラ10台
運行期間
令和8年3月24日(火)~29日(日)
※令和8年3月上旬から準備運行が行われます。
運行区間
JR桂川駅前⇒洛西バスターミナル⇒(洛西ニュータウン周回)⇒洛西バスターミナル⇒JR桂川駅前
※JR桂川駅前、洛西バスターミナルにおいて、乗降が可能です。
運行ダイヤ

乗車方法
ご乗車には事前予約が必要です。予約専用サイトにて3月1日(日)0時から受付が開始されます。乗車枠に空きがある場合は、当日乗車も可能です。

運賃
無料
本実証内容について
本実証では、洛西ニュータウンエリアで住民を含む様々な方々に試乗してもらい、社会受容性の向上を図ります。また、令和9年度のレベル4認可取得に向けた自動運転走行データの取得も行われます。
検証ポイントとしては、以下の観点が想定されています。
-
自動運転化率:走行ルートを自動運転で走行していた割合
-
手動介入要因:自動運転から手動運転に移行した際の要因
-
乗車時の安心感:自動走行時に感じる乗客の安心感
-
利便性:自動運転車両が走行することによる利便性
運行経路
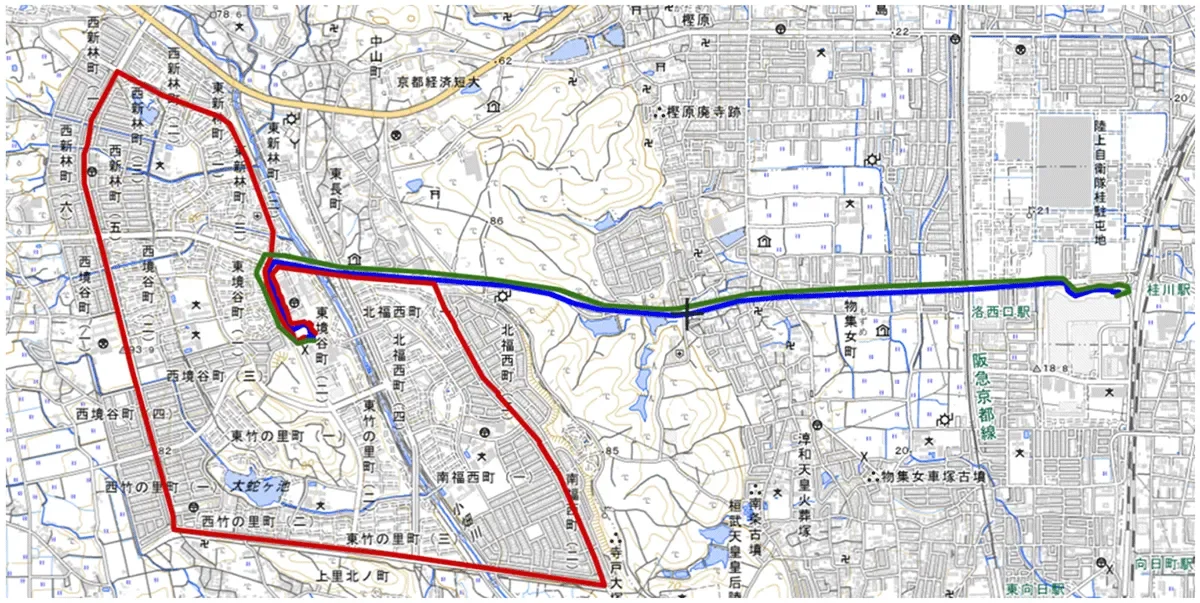

※出典:国土地理院ウェブサイト「地理院地図(電子国士WEB)」をもとに加工して作成
https://maps.gsi.go.jp/#15/34.962849/135.689014/&base=pale&ls=pale&disp=1&vs=c1g1j0h0k0l0u0t0z0r0s0m0f1
今後の展開
本実証を通じて、このルートにおける自動運転レベル4実装に向けた課題の整理と抽出が行われます。また、住民の積極的な参加により、社会受容性の向上が図られます。
令和8年度には、長期間運行や路車協調※4に関する実証が実施され、さらなる自動運転精度の向上と課題の抽出が行われる予定です。これにより、令和9年度中の自動運転レベル4認可取得を目指します。
これらの取り組みと並行して、他のルートへの展開も検討が進められ、京都市全体における地域交通の維持と発展を目指していくとのことです。
用語解説
-
※1:特定の走行環境条件を満たす限定された領域において、自動運行装置が運転操作の全部を代替する状態です。
-
※2:アクセル・ブレーキ操作およびハンドル操作の両方が、部分的に自動化された状態です。
-
※3:Light Detection and Rangingの略称。レーザー光で対象物までの正確な距離を測定し、遠方や周辺の状況をリアルタイムかつ立体的に把握できるセンサーです。
-
※4:路車協調技術とは、道路側(路側)に設置されたセンサーやカメラなどのインフラと、自動車(車)のシステムが通信で連携し、安全で円滑な自動運転や交通を実現するためのシステムです。


